Complexe semi-autonome mechatronicasystemen, we noemen ze ook wel robots, hebben de laatste jaren, net als een computer, een besturingssysteem waarin de basisfuncties geregeld worden.
De robots worden ondersteund en zijn verbonden met computers waar software op draait voor verschillende taken: supervisory control, integratiesoftware, visualisatie, rapportage of tools om te analyseren.
Men kan daar standaard (al dan niet open-source) pakketten voor gebruiken, maar kan men er ook voor kiezen om maatwerk software te ontwikkelen.
Bij echt nieuwe toepassingen zijn er geen alternatieven en heeft men de keus zelfs niet. Bovendien: elke commercieel pakket begon ooit als maatwerk.
Veel van de bouwstenen voor het onwikkelen van robotica-applicaties zijn standaard aanwezig in labVIEW:
data-verwerking, -presentatie, -opslag en -analyse.
In 2017 is een onderneming opgericht om de Serenity robotica software ontwikkelingen in onder te brengen.
Portfolio Serenity Robotics
Supervisory control software voor industrieele robots
Supervisory control/dashboard software voor een volgende generatie semi-autonome hogedruk industrieele watercleaners. Hiermee worden verticale tankwanden gereinigd als deelnemer aan het Interreg Smart Tooling project.
Een voor Zeeuws-Vlaanderen uniek technologisch interreg project (2017-2020) van KICMPI.
De door planningssoftware berekende cleaningspatronen worden als setpoint naar de robot gezonden.
De robot is door een andere onderneming binnen het samenwerkingsverband voorzien van ROS-gebaseerde motioncontrol. In LabVIEW diende daarmee een koppeling gemaakt te worden.
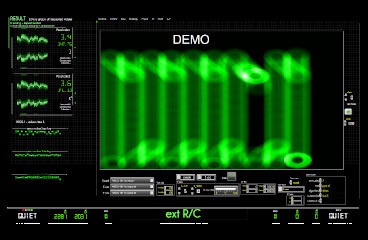
Binnen de van uitgebreide functionaliteit voorziene applicatie wordt onder meer het gereinigde oppervlakte in beeld gebracht (zie afbeelding).
Het verloop van de cleaning wordt op deze manier tevens als video opgeslagen en vormt tevens de basis voor het automatisch opgewekte voorlopige rapport.
Het is de verwachting dat er met deze voorlopige cleaningrapportage bepaald kan worden of de cleaningjob, met de berekende kennis die op dat moment beschikbaar is, afgerond is of nog niet.
Verder kan de gemeten en verzamelde data gebruikt worden om meer kennis te vergaren over geautomatiseerd hogedruk reinigen met autonome robots.
Het doel is om hiermee in de toekomst de vooraf berekende cleaning-patronen en proces-parameters verder te kunnen optimaliseren.
De toekomst zal uitwijzen of dit mogelijk en/of wenselijk is. Actuele info is hier te vinden.
Motion Activity planning software voor industrieele robots
Software waarmee de bewegingspatronen en activiteiten van Maintenance 4.0 robots worden gepland.
Onderdeel van het Interreg Smart Tooling project van KICMPI.
Na invoer van de Go en NoGo area berekend de software bewegingspatronen van de semi-autonome cleanerbot.
De output is een job-beschrijvingsfile waarin o.a. de motion-patronen van de robots vastliggen.
Voordeel is dat men deze planning ruim vooraf met betreffende experts kan uitvoeren en niet ter plaatse onder grote tijdsdruk; de robot-cleaningwerkzaamheden liggen digitaal vast.
Een ingebouwde simulator kan gebruikt worden om de berekende of met de hand aangepaste bewegingspatronen te valideren.
Meer info op deze Serenity Robotics site.
Portfolio Serenity Systems Design
Bundelreiniger robot
Voor een project van KICMPI is gekeken naar de robotisering van bestaande bundelreinigers.
Bundels zijn het binnenwerk van warmtewisselaars: samengestelde hoeveelheden pijpen die zorgen voor verwarming of afkoeling van vaak chemische producten.
De pijpjes kunnen dichtslibben of zelfs verstopt raken. Bij onderhoud worden deze bundels verwijderd en op een spuitplaats gereinigd, vaak met behulp van nozzles die water onder hoge druk via slangen of buizen tegen de pijpwand spuiten.
Dit is gevaarlijk en nauwkeurig werk en daarom worden er verschillende veilige alternatieven bedacht zoals robotisering van de bundelreiniger.
Cruciaal bleek de positionering van de nozzles voor intrede in de pijpen (meerdere parallel) waarbij je maar enkele mm speling hebt.
Onderzocht is hoe vision kan zorgen voor een exacte positionering, maar ook hoe vooraf een optimale cleaning-volgorde berekend kan worden.
Een ervaren operator kan naast nauwkeurig positioneren ook de rotaties en posities zo instellen dat bij reiniging de meeste pijpen van een bundel gereinigd worden. Er is aangetoond dat dit ook met software (en zonder AI) mogelijk is.
Leverancier had geen belangstelling in deze innovatie: ontwikkeling gestaakt.
Software bridge PLC moton-control systeem CIProbot
Voor een toepassing in een kaasfabriek in Bleskensgraaf is een tijdelijke software bridge geprogrammeerd.
8 wrongelbereider tanks worden nu in plaats van met de hand automatisch gereinigd door een geavanceerde spuitrobot. De robot is een vinding en doorontwikkeling uit NL.
De robot maakt geavanceerde snelle bewegingen. De motoren worden aangestuurd en bekrachtigd door een geavanceerd en in eigen beheer ontwikkeld generiek motion-control systeem, ontwikkeld door een collega ontwikkelaar uit Zeeuws-Vlaanderen.
De bridge software zorgt ervoor dat de reinigingsrobots synchroon lopen met de kaasproductie. De productie zelf is overigens verregaande geautomatiseerd, wat integratie eenvoudiger maakt.
Winst ligt vooral op het gebied van hygiene omdat men de 8 vaten voor uitspuiten nu niet meer dient te openen.
De software slaat tevens getimestampte error en statuslogs op om onderhoud te voorzien van data.
Automatisering van de engineeringsfase voorafgaande aan de inbouw van dergelijke robots had ook aandacht.
Het tunen van de bewegingspatronen exact passende bij de 3D vormen van de te reinigen machine bleek nl. een bottleneck.
Er is gestart met software oplossing in eigen beheer, maar budget en tijd ontbrak om dit met succes af te ronden.
Carwash dryer robot
Voor een uitvinder in Oost-Vlaanderen is een geautomatiseerde master-slave aansturing van een carwash dryer robot ontwikkeld.
De robot dient de laatste fase van een carwash te vervangen, namelijk het drogen van het gereinigde voertuig.
Deze laatste fase vergt doorgaans de nodige kosten, zowel wat betreft elektrische aansluiting als de energiekosten.
Vaak betreft het hier nauwelijks exact gerichte ventilatoren voorzien van elektrische verwarming.
De uitvinder bedacht als alternatief om de contouren van het voertuig exact te volgen middels een meer-assige robot. Waterdruppels worden zo door de luchtstroom afkomstig uit de brede maar smalle robotmond op enkele cm's afstand van het voertuig onverwarmd weggeblazen.
Omdat er een centrale bediening nodig was is een master-slave besturing ontworpen, waarbij de slave robot-besturing (een realtime NI PAC controller) de bewegingspatronen en de afstanden tot het voertuig met een hoge snelheid meet, regelt en controleert.
Dit is de supervisory control.
Speciaal aan deze oplossing is verder dat de contouren van het voertuig niet direct gemeten maar berekend worden uit een indirecte meting aan de bestaande carwash-installatie.
Aan de hand van het contour wordt vooraf de 4-assige bewegingspatronen van de robot berekend. De nauwkeurige positieregeling om de luchtspleet constant te houden gebeurt met behulp van redundante afstandssensoren.
Om de berekende robotbewegingen te controleren (kan de robot deze beweging maken en ontstaan er hierdoor geen botsing tussen robot en voertuigen?) is tevens in LabVIEW een 3D simulatie gemaakt.
Hiermee kan men het bewegingspatroon van de robot voor elk autovorm simuleren.
Op dit moment is deze experimentele drycleaningrobot zelf nog niet gerealiseerd; de hard en software van het besturingssysteem is opgeleverd.
 Supervisory control software voor industrieele robots
Supervisory control software voor industrieele robots Motion Activity planning software voor industrieele robots
Motion Activity planning software voor industrieele robots Bundelreiniger robot
Bundelreiniger robot Software bridge PLC moton-control systeem CIProbot
Software bridge PLC moton-control systeem CIProbot Carwash dryer robot
Carwash dryer robot Om de berekende robotbewegingen te controleren (kan de robot deze beweging maken en ontstaan er hierdoor geen botsing tussen robot en voertuigen?) is tevens in LabVIEW een 3D simulatie gemaakt.
Om de berekende robotbewegingen te controleren (kan de robot deze beweging maken en ontstaan er hierdoor geen botsing tussen robot en voertuigen?) is tevens in LabVIEW een 3D simulatie gemaakt.