Doel:
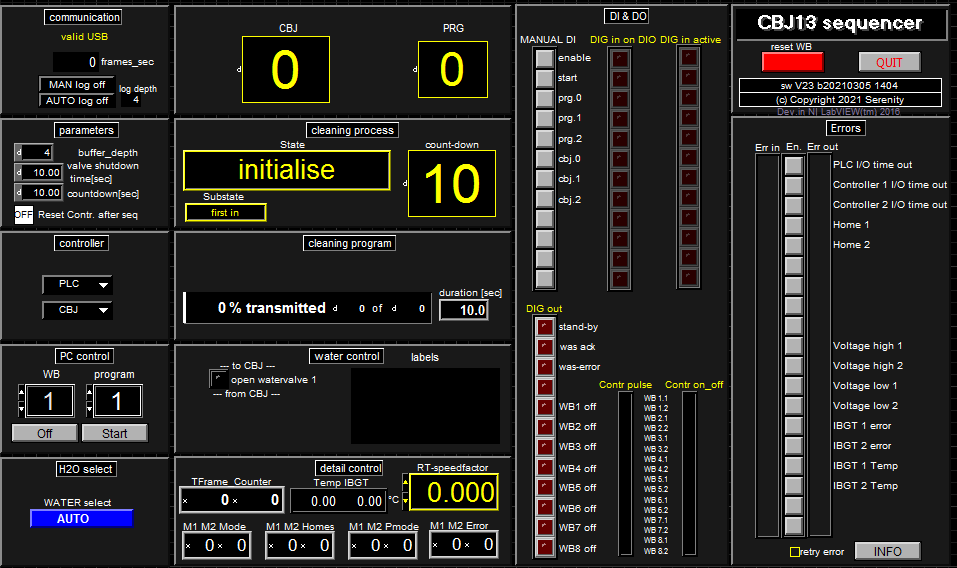
Software waarmee de sequences van de intelligente stappenmotorcontroller van een zeeuwse onderneming verzonden worden. Tevens vindt hier het afvangen van errors plaats en de binaire communicatie met de master PLC van de fabrieksinstallatie. Met de verschillende hardware onderdelen vormt het geheel een multi-robot motion-control systeem welke direct door de plantPLC aangestuurt wordt om te reinigen. Deze PC Windows applicatie is een tijdelijke oplossing, in de toekomst is een (eventueel zelf te ontwikkelen) realtime systeem gepland.
Omschr:
Het multi-robot cleaning systeem bestaat uit 8 reinigingsrobots die parallel de reiniging met een exact gepositioneerde jetkop snel kunnen uitvoeren. Technisch is dit gerealiseerd door twee afzonderlijke motion-controllers per robot die de stappenmotoren exact en krachtig aansturen om de jetkop te richten. Vooraf zijn de bewegingspatronen berekend en worden snel uitgevoerd. Die bewegingspatronen zijn als files beschikbaar (per robot kan uit 8 patronen gekozen worden) en kunnen desgewenst aangepast worden voor een alternatief spuitpatroon of voor een andere geometrie van het te reinigen object. De koppeling met de CANbus wordt verzorgt door een USB-CAN bridge en met de plant-PLC wordt middels een digitaal/analoge CANbus I/O module gecommuniceerd. De USB-CANbridge, de CANbus I/O module en de intelligente motioncontroller-drivers zijn ontwikkeld door WJ van Hoek innovatieve elektronika.
In de applicatie kan vanuit de automatische of manuele stand gekozen worden uit 8 robots bij een keuze van 8 waspatronen per robot. Met de snelheidsparameter kan de snelheid van het patroon aangepast worden.
Result:
Operationeel bij kaasfabriek De Graafstroom te Bleskensgraaf van 2009 tot 202x(heden).
Tool:
NI LabVIEW 5.1.1 & 2016
H.W.:
USB-CAN bridge zeeuwse onderneming
input:
nvt via 16 motion-controllers
output:
nvt via 16 motion-controllers
dacq:
nvt via 16 motion-controllers
comm:
CANbus via USBbridge ; PLC interface via CAN I/O module
klant:
intern Aardenburg – Biervliet NL
periode:
2007-2010 (Rev. 2020-2021)