[bron KICMPI]
Smart Tooling is een project binnen het Europese programma Interreg Vlaanderen-Nederland. Voor het project Robotica Smart Tooling ontwikkelt Ki<|MPi in samenwerking met partners uit Vlaanderen en Zuid-Nederland, innovatieve Robotica toepassingen voor maintenance in de procesindustrie.
Doelstelling
Het project heeft als doel het versterken van de procesindustrie door kostenefficiënter en veiliger te werken. Uit onderzoek blijkt dat er behoefte is aan meer dan 50 concrete robottoepassingen. MKB/KMO ondernemingen hebben de uitdaging om technologische oplossingen samen met kennisinstellingen te ontwikkelen. Hiervoor zoekt Smart Tooling KMO/MKB bedrijven die in samenwerking met kennisinstellingen technologische oplossingen ontwikkelen:
– 8 service providers (grote ondernemingen of KMO/MKB) in het onderhoud van procesindustrie worden als projectpartner light ingeschakeld voor het faciliteren van onderzoek en testen bij asset owners. Voor deze groep is een totaal budget voorzien van € 270.000, waarvan 40% gesubsidieerd wordt.
– 16 KMO/MKB bedrijven worden als projectpartner light ingeschakeld voor de daadwerkelijke ontwikkeling, engineering en bouw van prototypes/proofs of concept. Voor deze groep is een totaal budget voorzien van € 1.400.000, waarvan 50% gesubsidieerd wordt.
– 32 ondernemingen worden actief betrokken in de innovatieclusters, maar krijgen geen geldelijke steun.
Partners en Partners Light
Voor het financieel en inhoudelijk projectmanagement van het Smart Tooling project is KIC
Het project is opgedeeld in diverse clusters, waarbij enkele Project Partners Light zijn ingestroomd om deze innovaties te ontwikkelen tijdens de project periode.
Toepassingen binnen het cluster:
Project Partner Light
UAS – Binnen vliegen
Ronik, Delft Dynamics, POZYX
UAS – Buiten vliegen
SPIE, Avular, Airobot
Werkplaats
ITIS, IRISTICK , Augnition n.v.
Cleaning
Vertidrive, Group Peeters, Mourik, Buchen, Serenity, Heemskerk, VTEC
Inspectie – Leidingen
VTEC, IDTEC, Serenity
Financiers
Interreg V Vlaanderen-Nederland is een programma van de Europese Unie, gericht op grensoverschrijdende samenwerking dat tot doel heeft de innovatie en duurzame ontwikkeling binnen de grensregio versterken en bevorderen. In deze projecten werken bedrijven, bedrijfskoepels, overheden, kennisinstellingen en andere organisaties aan weerszijden van de grens met elkaar samen om tot concrete vernieuwingen te komen. Voor 2014-2020 voorziet Europa voor het programma ruim 152 miljoen euro, uit het Europees Fonds voor Regionale Ontwikkeling (EFRO). Het Smart Tooling project ontvangt subsidie vanuit Interreg Vlaanderen-Nederland programma.
April 2017:
Toepassing van technische software voor uitdagingen van de volgende generatie Smart Robotics op plaatsen waar ook robots het werk kunnen doen.
De ontwikkelomgeving LabVIEW wordt hiervoor gebruikt.
Toepassingen zijn:
– Geautomatiseerd bewegingspatronen van robots bepalen.
– Opslag, analyseren, visualiseren en rapporteren van de Big Data die opgewekt wordt bij autonome en remote control robot aansturing.
– Automatisch opwekken optimale positionering en rotatie sequence voor de reiniging van warmtewisselaar bundels.
– Dashboard voor status-informatie robot.
– Software integratie diverse hardware-systemen.
Deze mega-trend is te negeren. Of men kan er door partnership een actieve rol in spelen.
Maart 2018:
Op 21 en 22 maart 2018 was Serenity standhouder op het Robot demo plein op de Maintenance beurs te Antwerpen, ons aangeboden door KI<|MPI en BEMAS. Ook collega (waaronder alle zeeuwse) PPL project partners uit het Interreg Smart Tooling project informeerden bezoekers en journalisten over dit project en de voordelen van 21ste eeuwse technologie voor de industrie in het algemeen.
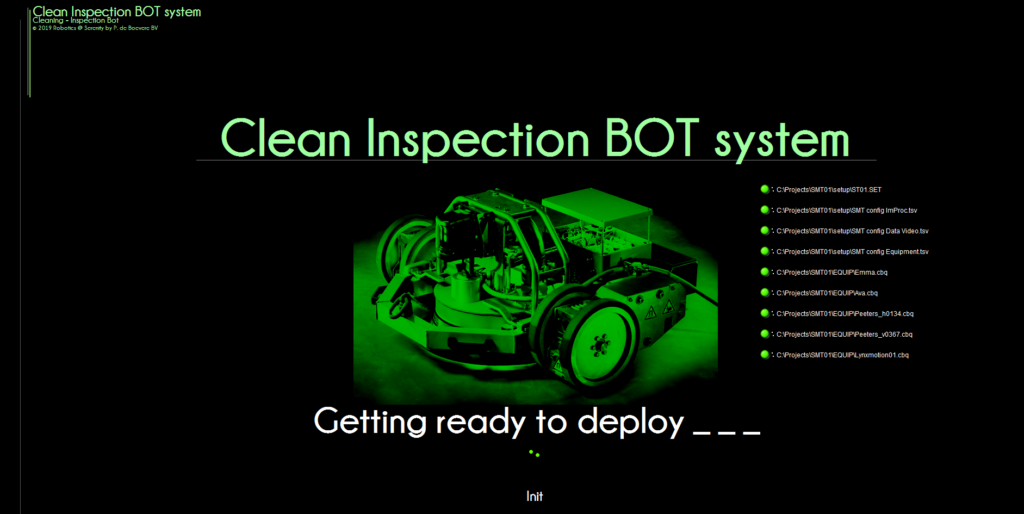
Op de Serenity stand werd de voortgang van de Dashboard software voor zowel een nieuw te ontwikkelen inspectie als cleaning robot getoond. Doel van het Dashboard is om de operator volledig te informeren over de status van zowel de robot als de voortgang en het eindresultaat van het inspectie- of reinigingsproces. De robot volgt een vooraf nauwkeurig ingeplande route in de afgesloten ruimte. Ondanks dat de joystick slechts bij uitzondering gebruikt wordt, is het belangrijk dat de operator zijn robot-assistent steeds controleert. Nu werkt men vaak met enkele primitieve metertjes, maar als men de robot niet visueel in de gaten kan houden zal een uitgebreid dashboard nodig zijn.
In het project kan m’n onderneming optimaal gebruik maken van eerder opgedane ervaringen bij software-integratie van meetsystemen (voor R&D, productie en milieudiensten), User Interfacing voor mega-jachten en assistentie bij het doorontwikkelen van een CIP-robot voor wrongel verwijdering. Het komt mooi uit dat veel van de oplossingen die destijds zijn bedacht, bruikbaar zijn in dit zeker voor zeeuwse begrippen technisch ambitieuze cluster van innovatie-projecten.
Met gelijkgestemde collega-ontwikkelaars die ontwerpen aan de robots, diens besturing, de lokalisering of de erin of eraan bevestigde sensoren, zijn we goed op weg.

April 2018:
De afgelopen periode heeft het bedrijf veel energie gestoken in de ontwikkeling van het Dashboard dat bestaat uit diverse software-modules (ontwikkeld in labVIEW) om de operator inzicht te geven in het gedrag van de robot. U moet begrijpen dat er geen visueele controle van de robot mogelijk is omdat die zich in een afgesloten ruimte bevindt. Veilig buiten die zone heeft de operator een goed inzicht in het inspectie- of reinigingsproces nodig zodat hij/zij indien nodig tijdig kan ingrijpen.
Datalogging: Opslag-processen op de achtergrond slaan de uitgevoerde bewegingen en gegevens uit de robot-sensoren op. Hiermee wordt data verkregen voor het verder optimaliseren van de werking van de robot. Tenslotte is dit geen engineering, maar is dit een typisch voorbeeld van een ontwikkelingsproject waarbij geleerd wordt van eerdere uitgevoerde cleaning- en inspectieruns.
Daarnaast is de opgeslagen data de input voor de geautomatiseerde presentatie van de cleaning- of inspectieresultaten en de geautomatiseerde rapportage.
Een operator wil namelijk graag na afloop van z’n klus weten of hij echt klaar is, of dat extra werkzaamheden nodig zijn.
Als voorbereiding op het gebruik van de robot zal in de komende periode verder ontwikkeld worden aan een editor die de bewegingen en handelingen van de robot vooraf nauwgezet plant. Door die planning met de juiste betrokken personen uit te voeren sluit men de kans op verrassingen en ongewenste bewegingen nog verder uit.
Mei 2018:
Op 17, 18 en 19 april 2018 was Serenity gast-standhouder op het demo-plein van iTanks KI<|MPI op het Easyfairs Maintenance event te Gorinchem. Omringd door diverse aansprekende technische ontwikkelingen van jonge en ervaren ondernemers werden de bezoekers enthousiast gemaakt voor technieken waar deze branche nu en in de toekomst mee te maken krijgt.
Standhouders van jonge bedrijven die met enthousiasme en vaak een ferme dosis relevante innovatie-ervaring in andere branches slimme oplossingen bieden.
Door de eerste zomerse dagen van het jaar en de eerste editie van deze beurs was er tijd om met collega innoverende ondernemers de diepte in te gaan en met ervaren spelers te praten over de onderhoudsbranche. Op de laatste dag is wel een krukje aangeschaft, 3 dagen op een beurs “staan” is fysiek even wennen
Juni 2019:
In de tweede helft 2018 en het eerste deel van 2019 is hard gewerkt aan de verdere ontwikkeling van het Smart Tooling Robotica project. Voor een programmeur betekend dit het invullen van de functionaliteit, het uitproberen van oplossingen (en alternatieven daarvan) en het toewerken naar twee bruikbare software Tools.
De Configurator en het Dashboard vervullen een aparte rol en zijn ook bedoeld voor verschillende gebruikers. Met de Configurator plan je de activiteiten nauwgezet vooraf in een kantooromgeving; met het Dashboard gaat de robot-operator aan de slag zodat hij/zij zonder gedoe maar met optimaal inzicht in het gedrag van de robot z’n werk kan doen.
Gedurende het proces van ontwikkelen en oplossen ontdek je zaken die ook interessant zijn voor robotica en die door de combinatie van nauwkeurige sensoriek en plaatsbepaling, rekenkracht en het lenen van andere disciplines mogelijk zijn geworden.
Recentelijk is vernomen dat het project een mogelijk vervolg krijgt om de opgedane ervaringen, het ontstane netwerk van experts en het gegroeide vertrouwen bij de belanghebbenden verder uit te nutten bij de ontwikkeling van nog meer moois voor deze branche.
Soms vraag je je dan af hoe actief andere branches 21ste eeuwse ontwikkelingen omarmen.
Of wachten die gewoon af in de hoop dat de disruptie-golven hen niet zullen raken?
[bron KICMPI]
Augustus 2019: Voortgang project Smart Tooling.
Smart Tooling is een project binnen het Europese programma Interreg Vlaanderen-Nederland. In het Smart Tooling-project worden, met de steun van Interreg V Vlaanderen-Nederland, KMO/MKB bedrijven en service providers uit het grensgebied België-Nederland als partners samengebracht om robottechnologie te ontwikkelen. Zo wil men door kostenefficiënter en veiliger te werken de procesindustrie versterken.
Voor het financieel en inhoudelijk projectmanagement van het Smart Tooling project is KicMPi verantwoordelijk gesteld. Binnen het project werken de volgende project partners nauw samen: BASF, Dow Benelux, Impuls Zeeland, REWIN, BOM, BEMAS, Sirris, Universiteit Gent, Universiteit Twente en Avans Hogeschool.
Op dit moment nemen er 19 Project Partners Light actief deel in dit project in de vorm van clusters, namelijk het cluster inspectie, werkplaats, UAS en cleaning.
Het project loopt ondertussen bijna drie jaar. Een stand van zaken.
Verlenging projectduur:
Het project Smart Tooling is gestart op 1 september 2016. De oorspronkelijke einddatum zou zijn 31 augustus 2019. Op 10 juli 2019 hebben wij goedkeuring ontvangen om de projectduur te verlengen tot en met 31 mei 2020.
Een aantal deelprojecten vergen voor het realiseren van de testplannen een langere looptijd dan de actuele projectduur. De verschillende deelprojecten kunnen door de verlengde projectduur met een kwalitatief resultaat afgerond worden.
Voortgang Cluster Cleaning:
Het thema cleaning richt zich op het ontwikkelen van een robot, welke vervuiling in zowel besloten ruimtes als oppervlaktes zal herkennen, losmaken en kan verwijderen. Het doel is om de robot op autonome wijze in te zetten om vuil te herkennen en te onderscheiden om zo tot een hoger veiligheid niveau en een hogere efficiency te komen.
Projectpartners: Buchen, Group Victor Peeters, VTEC, P. de Boevere B.V., Accerion, Nobleo Technology, Avans Hogeschool, DERC Waterjetting, BASF, Mourik, Dow Benelux
De drie service bedrijven die input leveren zijn Mourik, Buchen en Group Victor Peeters.
Zij delen de eigen kennis rondom cleaning en leveren daarnaast een ondersteuning binnen de tests van de robotica. Daarbij richt Mourik zich op navigatie. Buchen richt zich op de reinigingsgraad. Group Victor Peeters richt zich op metingen, data analyse en het autonome werken.
De technische groep binnen dit cluster wordt gevormd door VTEC Lasers & Sensors, P. de Boevere B.V. (Serenity), Accerion, Nobleo Technology en Avans Hogeschool.
VTEC richt zich op de sensor technologie en communicatie van de data.
Waarbij P. de Boevere B.V. de taak heeft zich te focussen op data acquisitie, data logging, rapportage en data processing. Accerion en Nobleo Technology richten zich binnen dit project op plaatsbepaling en navigatie van de cleaning robot.
DERC Waterjetting levert in het cluster cleaning een zo geheten carrier platform (drager). DERC Waterjetting zal de aanpassing aan het platform ontwerpen en installeren. Het doel is om het carrier platform te ontwikkelen t.b.v. autonoom opereren en reinigen.
Nobleo Technology heeft de navigatie software verder ontwikkeld en verschillende test uitgevoerd op de test faciliteit bij Group Peeters. Er is een test met hoge druk uitgevoerd door Mourik in een tank bij Dow.
Serenity heeft aan de dashboard software gewerkt en een bijeenkomst georganiseerd om de interacties tussen de verschillende systemen in kaart te brengen.
Stichting Avans heeft de door VTEC ontwikkelde sensoriek voor vervuilingsmeting ingebouwd in een door studenten ontworpen Inspectie robot. De volgende stap is de robot voorzien van een navigatiesysteem en deze VTEC sensoren te testen.
De volgende stappen zijn onder andere verbeteringen doorvoeren op basis van praktijktesten met betrekking tot het regelen van de magneet sterkte bij de Cleaning robot. Hiervoor wordt een regelsysteem ontwikkeld. De hoogte van de magneten van de DERC carrier zullen instelbaar worden gemaakt. De komende tijd zal gewerkt gaan worden aan de integratie van de Serenity-Nobleo technologie.
Voortgang Cluster Inspectie:
Het cluster inspectie focust zich op de sub thema’s ‘inspecties in vaten’ en ‘inspectie in leidingen’.
Inspecties in vaten:
Dit project heeft als doel het uitvoeren van volautomatische inspecties in drukvaten op wanddikte en corrosie vorming.
Projectpartners: ID-Tec, VTEC Lasers & Sensors, P. de Boevere B.V., Nobleo Technology, Universiteit Gent, BASF, Dow Benelux, Impuls Zeeland
ID-Tec heeft, met de inbreng van de verschillende project partners, de I-ball inspectie robot ontwikkeld. Deze balvormige robot kan inspectie uitvoeren in drukvaten welke gevuld zijn met vloeistof. Inspectie data kan worden verzameld en gecommuniceerd. Voor het realiseren van de inspecties is de ontwikkeling van een ‘Eddy Current wanddikte sensor’ noodzakelijk.
De volgende vervolgstappen dienen nog te worden uitgevoerd:
– Sonar plaatsbepaling in (andere) vloeistoffen. LIDAR plaatsbepaling in (schone) vloeistoffen heeft reeds plaatsgevonden.
– Sonar communicatie in vloeistoffen.
De demoversie zal dit najaar gereed zijn. Nobleo Technology komt na oplevering en testen van de I-Ball in beeld voor het autonoom maken van de besturing.
November 2019: Contacta Goes
Serenity Robotics (P. de Boevere BV) zal aanwezig zijn op de regio B2B beurs Contacta 2019 te Goes.
Na 3 maal eerder als (gast-)standhouder aanwezig te zijn geweest is de ontwikkelaar van high-tech ondersteunende software ook dit jaar aanwezig.
Ook dit jaar presenteert de onderneming zijn aandeel in het Smart Tooling project van KIcMPI: software-begeleide activiteiten-planning en het operator-dashboard.
De ontwikkeling van remote en autonome robotoplossingen voor inspectie en andere maintenance-activiteiten in de industrie zoals cleaning zijn in een stroomversnelling geraakt toen het betreden van afgesloten ruimtes slechts bij uitzondering nog toegestaan werd.
De procesindustrie in de westerse wereld is nu eenmaal erg gevoelig voor veiligheidsstatistieken.
Het resultaat is een overvloed aan eerste generatie tele-opererende cleaners waarbij de operator nog met de hand met een joystick bedient, al dan niet ondersteund door een camera.
De tweede generatie, zoals ontwikkeld binnen het Smart Tooling project, zal bestaan uit robots met meer sensoriek, intelligentie en autonomie.
In mijn visie worden de voorbereidende werkzaamheden voordat een robot automoom zijn taken gaat doen steeds belangrijker in een wereld die snapt dat operators geen 8 uur achter elkaar aan een joystick lopen trekken, maar ook dat we niet zondermeer een autonome robot met SLAM maar z’n gang laten gaan in het metalen vat of tank.
De robot-operator dient optimaal geinformeerd te worden over de status en het gedrag van de robot, in combinatie met de vooraf minitieus geplande bewegingen al dan niet uitgevoerd met een of meerdere samenwerkende robots.
De operator grijpt slechts in op het moment dat de robot het niet meer weet of dat er zich onvoorziene situaties voordoen.
Vooraf is de orchestratie en synchronisatie van de bewegingen en activiteiten belangrijk, maar ook dat aangepast kan worden aan een hogere of lagere vervuilingsgraad als vooraf was geraamd.
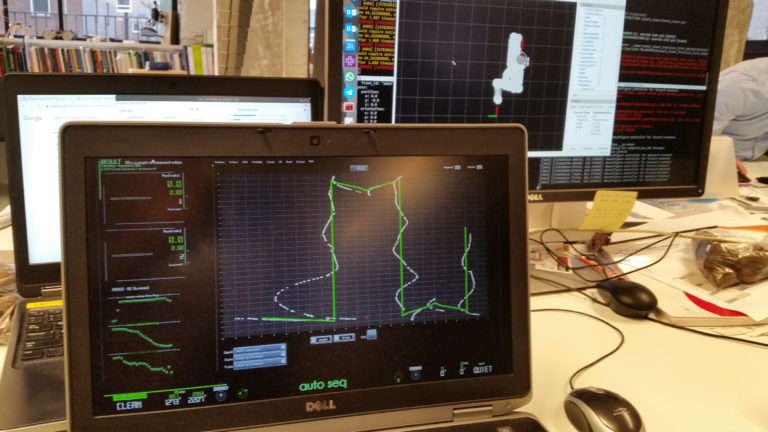
Optimaal informeren van de operator, daar draait het om bij het dashboard, zodat hij kan ingrijpen wanneer nodig. Om dit te bereiken is gebruik gemaakt van een uitgebreide multi-panel view, standaard met 2 actieve schermen.
Ook uniek is dat een cleaning-model een raming kan maken van de gereinigde oppervlakten. Met sensoriek of camera’s is dit namelijk lastig in beeld te brengen, maar met deze methode weet je exact welke plaats de cleaner bereikt heeft en hoe lang.
Daarnaast zijn de achtergrondtaken data-acquisitie, opslag van posities en andere sensor-signalen voor de data-analyse achteraf belangrijk. Ook vormt het de basis voor de automatische rapportage, een taak waar binnen de andere onderneming Serenity systems design bij het programmeren van milieu-meetsystemen veel ervaring mee opgedaan is.
Zonder de unieke combinatie van verschillende technologie-partners was een dergelijk ambitieus project niet mgelijk geweest. Localisatie in een afgesloten metalen ruimte is zelfs in de tijd van satteliet-positionering een uitdaging, maar gelukkig is een nederlandse pionier op dit gebied gevonden om een geschikte sensor te leveren. Ook voor de motion-control en de specifieke sensoriek zijn geschikte projectpartners geselecteerd.
Door diverse technische ontwikkelingen die elke dag met name plaats vinden in de regio Zuid-Nederland en vlak over de grens in Belgie, ondersteund door een infrastructuur van kennis en relevante ervaring bij ondernemer-ontwikkelaars(know-how en know-why) met steun van diverse opleidings- en onderzoekscentra kun je tot een dergelijk resultaat komen.
En soms zit relevante ervaring waar je het niet zou verwachten: in Zeeuw-Vlaanderen.
Interesse?
Op Contacta 2019 kunt u meer te weten komen over dit project.
December 2019: Na Contacta 2019
Gedurende 2 dagen had het nu onder de handelsnaam Serenity Robotics opererende bedrijf de nodige belangstelling van bezoekers voornamelijk uit de regio Zeeland/West-Brabant. Goed om bekenden te spreken en nieuwe contacten op te doen in ondernemende Zeeland.
“In een regio van landbouw, toerisme, logistiek of zware industrie is high-tech toch een uitzondering, maar juist daarom zijn gesprekken met bezoekers die hier wel iets mee hebben zo interessant. Verder is een beurs een platform waar je datgene kan presenteren waar je je de hele tijd op blindstaart en waarvan je elke byte of pixel zelf hebt geschapen. Opmerkingen of aanvullingen zijn dan van harte welkom, al hoop je natuurlijk op meer kwaliteitscontact-momenten.”
De eerste contacten zijn gelegd met een roofcleaning-expert die een grote toekomst verwacht van autonome drone-gebaseerde inspectie en reiniging van daken. Naast wetgeving is de integratie met technologie daar nog een obstakel.

Februari 2020: Status
Op 7 januari 2020 is een succesvolle test uitgevoerd bij Nobleo (Eindhoven).
Helaas bleek bij aankomst de fysieke cleaner-robot op een andere locatie te staan (bij Derc Salotech) en werd er een communicatieverbinding gemaakt met een onder ROS draaiende software robot-simulator. Dit lukte snel.
Bij die integratie-test kwamen nog aanvullende punten naar boven zoals een verschillende assenstelsel-definitie, nog niet geheel juist gekozen controleparameters in de motion-controller (richtingsverandering van de robot is traag en er is veel overshoot) of het nog ontbreken van de CAN-bus informatie met betrekking tot uitgestuurde en ontvangen motor-driver data.
Er werd afgesproken om de volgende keer op afstand verbinding te maken.
Verrijkt met de test-ervaringen zijn in de volgende periode aanpassingen aan zowel de Configurator als het Dashboard doorgevoerd.
Maart 2020: Update
Het project Smart Tooling had de finish bijna in zicht. Door de maatregelen m.b.t. Covid-19 is er echter uitloop van de praktijktesten en van de promotie van Smart Tooling (Maintenance-beurs Antwerpen). De ontwikkeling van de software gaat bij Serenity Robotics gewoon door, ook na be-eindiging van Smart Tooling.
De nodige functionaliteit is in- en aangevuld bij zowel de Configurator als het Dashboard/Supervisory Controller. Vanwege het feit dat dit maatwerk software betreft met een zeer uitgebreide functionaliteit die in eigen beheer/locatie wordt geprogrammeerd en getest en waarbij de hardware niet beschikbaar is om aan te sturen gedurende de ontwikkeling, verloopt dit iteratief.
In het dashboard zijn er twee modes toegevoegd die passen bij de praktijk:
– een stealth-mode die alleen registreert (voor nadere analyse en inzicht in robot-cleaning)
– een basis User Interface waarmee alle controle en uitlezing op 1 scherm is geplaatst. Dit is voor toepassingen waar alleen basis-functionaliteit gewenst is bij een beperkte ruimte.
Daarnaast heeft de full-mode extra windows/tabs gekregen waarmee een count-down van het cleaning-proces zichtbaar wordt of waarmee de overige betrokkenen bij cleaning op een grotere kijkafstand geinformeerd worden.
Eerder is in aansluiting op die optie in de Configurator in het Dashboard een 3D view toegevoegd om zowel de gewenste als de werkelijke positie van de robots te tonen.
In afwachting van de geplande praktijktest worden in de komende periode beide uitgebreide software-modules verder geperfectioneerd.
Juni 2020: Update
Het project is verlengd t/m 30 november 2020.
Het slotevent staat gepland op donderdag 12 november 2020 (13:00 – 18:00 uur).
Dec 2020: Update
Project Smart Tooling is beeindigd per 30 november 2020.
A.g.v. de opgelegde Covid-19 maatregelen kon het geplande slotevent helaas niet fysiek maar wel on-line doorgang krijgen. Patrick de Boevere: “Graag had ik het resultaat van m’n software werkzaamheden voor de volgende generatie semi-autonome maintenance robots getoond aan het publiek.”
Dit on-line slotevent is hier te bekijken. Video’s van de innovaties zijn hier te vinden.
Verder is er een geprinte en on-line brochure beschikbaar die een beeld schetst van de diverse deelprojecten door middel van interviews met enkele betrokkenen.
Het goede nieuws is verder dat op 15 december de intentie uitgesproken is om verder te gaan met de ingeslagen weg bij het ontwikkelen van concrete oplossingen voor de uitdagingen van de industrie van vandaag en morgen: praktisch bruikbare robots die de onveilige delen van onderhoudsactiviteiten kunnen uitvoeren.
Verschillende deelnemers aan “Smart Tooling” hebben bewezen daar een voortrekkersrol in te spelen.
Patrick de Boevere: “Persoonlijk kijk ik dan ook terug op een dynamische project waarmee wat mij betreft bewezen is dat ook in deze Zeeuws-Vlaamse regio 21ste eeuwse technologische ontwikkelingen succesvol geinitieerd en uitgevoerd kunnen worden. Met positieve energie, de juiste steun en deelnemers en een heldere focus op de toekomst is veel te bereiken.”
Jan 2021: Update
Serenity Robotics heeft binnen het Interreg project Smart Tooling voor de Proces Industrie twee prototype software modules ontwikkeld voor het autonoom maken van een 21ste eeuws industrieel cleaning systeem.
De robot reinigt vertikale wanden van afgesloten stalen, vaak cylindervormige, ruimtes.
Omdat er nog steeds relatief veel ongevallen gebeuren bij werkzaamheden in afgesloten ruimtes (met name bij onderhoud) is de procesindustrie op zoek naar oplossingen zoals robotica. De werkzaamheden zelf, cleanen met hoge druk en op grote hoogte, zijn an sich al gevaarlijk en fysiek enorm belastend waardoor er sinds enige tijd gemechaniseerde apparatuur beschikbaar is.
De eerste generatie cleaningrobots bestaan uit gemechaniseerde cleaners die voorzien zijn van afstandsbediening, maar deze vraagt oa uit ergonomisch oogpunt om een innovatieslag. Het zou toch makkelijk zijn als die enorme grote oppervlakten waarbij de cleaner alleen langzaam op en neer beweegt automatisch kunnen? De operator kan zich dan bezig houden met de lastige hoeken en gaten waar de robot nog geen raad mee weet.
Combinaties van 21ste en laat 20ste eeuwse technologie maakt het in principe mogelijk een dergelijk meer intelligent robotcleaningsysteem te ontwikkelen.
Daarom is binnen dit project een multidisciplinair team van ontwikkelaars en cleaningdeskundigen samengesteld om aan deze oplossing te werken en een prototype te realiseren.
De rol van Serenity Robotics is de bewegingsplanning en operator-dashboard.
Werkzaamheden bestaan uit de fasen voorbereiding, uitvoering en analyse.
Van deze drie fasen zijn de eerste twee software ondersteund: voorbereiding en uitvoering.
Met behulp van een software configurator wordt de cleaning job vooraf en/of op afstand voorbereid door experts en verantwoordelijken. Het te reinigen object, de silo of tank, wordt ingegeven en de Go en No Go area gedefinieerd; automatisch worden cleaningpaden opgewekt met instelbare snelheden en afrondingen van de hoeken.
Een simulator emuleert in 2 en 3D het berekende bewegingspatroon zodat men de geplande bewegingen van de robot kan controleren.
Bij de uitvoeringsfase gebruikt men een supervisory dashboard welke de vooraf berekende posities doorstuurt naar de slave cleaningrobot; deze robot is door een andere projectpartner intelligent gemaakt en voorzien van een positiesensor die door een sensor-project is aangeleverd. De door de robotsensoriek gemeten en berekende waardes worden opgeslagen en getoond.
Een voordeel van robotica is dat er data wordt opgewekt; als je die analyseert kan men hier cleaningkennis mee opdoen en achteraf verbeteringen mee doorvoeren.
Tevens wordt er live een grafisch cleaning-resultaat berekend, waardoor de voortgang zichtbaar wordt ook zonder het gebruik van camera’s.
De rapportage van de werkzaamheden is geautomatiseerd en de operator en andere cleaning-betrokkenen worden op de hoogte gehouden van de status van de reinigingswerkzaamheden.
Er is bij de ontwikkeling van het dashboard rekening gehouden met verschillende gebruikerssituaties. Als men alleen met handbediening reinigt kan men toch de data verzamelen als een soort black box data recorder.
Voor standaard relatief korte reinigingen zal het basis HMI volstaan, maar als men gedurende langere tijd plaats neemt in bijv. een bedieningscockpit biedt het multischerm grafische HMI met verschillende pagina’s en tabs meer inzicht in de cleaning.
De data die opgeslagen wordt is geschikt om een goed inzicht in de uitgevoerde cleaning te krijgen (bijv. een timelapse van de berekende cleaning-voortgang) maar ook relevante data om een eventueele analyse mee uit te voeren voor verder inzicht in cleaningprocessen en optimalisaties daarvan.
Tot slot: “M.i. is met de inzet van diverse 21ste eeuwse technologieen een enorme technische verbeteringsslag gemaakt om deze branche middels autonome robotica (en rekening houdend met de specifieke wensen van de industrie) verder te helpen met een aanzet tot geschikte hulpmiddelen voor een veilige en goede reiniging.”
Nawoord:
Serenity Robotics is na 2020 niet meer uitgenodigd of geselecteerd bij oproepen door de betrokken organisaties/bedrijven om aan het vervolmaken van deze high-tech onderhouds robots deel te nemen. Ook over evaluaties over het verloop van dit project is m’n bedrijf niet op de hoogte.